SERVOS: Sus Secretos
Varias veces nos topamos con la duda sobre qué tipo de servo usar en cada modelo o mando y recurrir a las tablas de los fabricantes, aumenta más el misterio, pues muchas veces, el servo que nos recomendaron en el plano no figura en los listados y no sabemos cómo seleccionar alguno apropiado. La confusión aumenta, además, por los distintos torques, dimensiones, pesos y materiales y tenemos que escoger entre engranajes metálicos, plásticos, digitales, análogos o brushless.
El siguiente artículo no pretende ser un tratado científico de los servos, pero debemos saber algunas cosillas previas para que nuestra selección sea la acertada o podamos entender las recomendaciones de los más experimentados (que poseen la extraña costumbre de hablar en jergas incomprensibles para los novatos), y su correcta forma de instalarlos.
1.- La Función del Servo:
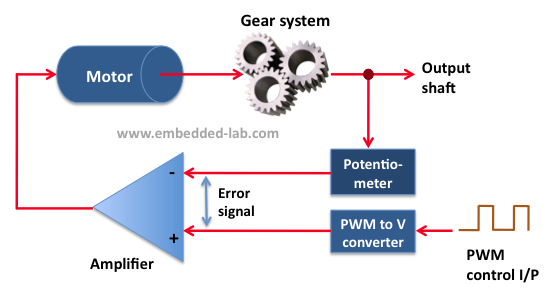
El servo es el encargado de ejecutar el movimiento de la superficie de mando de un avión o del mecanismo al cual haya sido asociado, que puede ser el control de aceleración del motor, aerofrenos, compuertas, trenes de aterrizaje o un largo etc. Visto esto, tenemos que la principal caracteristica de funcionamiento de un servo debe ser su capacidad de generar fuerza.
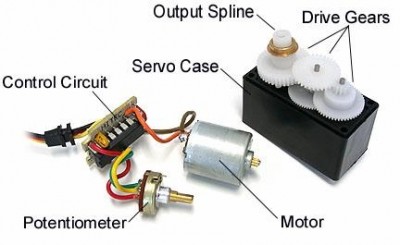
Para generar esa fuerza, recibe la orden por medio del cable conector desde el receptor, indicando cuanto y a qué velocidad y sentido moverse. Esa señal es interpretada por un microcircuito integrado que envía el pulso eléctrico al motor y ese motor mueve el tren de engranaje (Gears) que multiplica la fuerza, moviendo un brazo el cual actúa sobre el aparato que se quiera mover.

2.- Cómo leer las especificaciones de un Servo:
Un Servo posee las siguientes características informadas por el fabricante, como referencias (ejemplo):
The Futaba S9155

Specifications (En verde su definición)
Gear-Metal: Se refiere al material de los engranajes Metal, Carbonite (un tipo de plástico especial basado en carbono), bronce, titanio, etc. En caso que no traiga especificado; entonces los engranajes son plásticos
Bearings-Dual ball: Se refiere a si los ejes principales del tren de engranajes están montados en rodamiento o no y su cantidad. Se entiende que un eje montado en rodamientos es más durable, rápido y preciso.
Motor-Corless: Se refiere a la tecnología del motor empleada, que es casi propia de cada fabricante. Existen en Coreless, 3-pole cored, Coreless 5-pole ferrite, etc. Un dato que es más publicidad que diferencias notables.
Type-Digital: Los servos actuales se clasifican en Analógicos o Digitales y tiene que ver con la forma en que procesan la orden desde el receptor y sus capacidad y velocidad de movimento. Lo importante de este dato es que los servos digitales son más rápidos, precisos y programables; en cambio los analógicos son los tradicionales. Un cuidado a tener en cuenta es que los servos digitales consumen más energía que los análogos ya que los digitales, aún en su posición central, están activos (con un típìco sonido).
Torque/Voltage-153 oz-in.(11.0 kg-cm) @4.8V. 193 oz-in.(13.8 kg-cm) @ 6.0V: Dato vital, que nos indica la cantidad de fuerza que puede general el servo a 1 cm (ó 1 pulgada), de distancia del eje (tornillo del brazo), a distintos voltajes. En caso que sólo tenga indicado un sólo voltaje de trabajo, no se debe usar con otra mayor. Los servos multivoltaje operan muy bien entre los rangos indicados, no necesitando reguladores intermedios.
Speed/Voltage- 0.16 S/60 deg.@4.8V. 0.14 S/60 deg.@6.0V: Indica la velocidad de trabajo en los distintos voltajes. La velocidad está normalizada en cuantas centésimas de segundo se demora en recorrer un ángulo de 60 grados.
Voltage- 4.8 to 6.0V: Se refiere al voltaje de trabajo. Casi todos los servos actuales pueden trabajar a 4,8 a 6V, pero también existen los servos de alto voltaje (8,4V).
Dimensions- 1.60 x 0.8 x 1.4 in.(40.0 x 20 x 37 mm): Las dimensiones de toda la caja del servo y la altura desde la base hasta el tope del eje (para considerarlo en partes estrechas).
Weight-2.2 oz.(61 g): El peso total del servo, con todos sus componentes estandar.
3.- Escogiendo el servo correcto:
Para escoger un servo correcto se deben considerar algunas generalidades ya establecidas, como son:
- Para aviones park flyer y foam y planeadores; el peso es lo importante. Los servos de hasta 9 gramos de peso y hasta 1,2 a 1,5 kg de fuerza son más que suficientes.
EJEMPLO DE SERVO
EJEMPLO DE SERVO 2
- Para aviones de 1,5 kg a 3 kg de peso (ejemplo, Glow 0.46 a 0.55), los servos estandar de 3 a 4 kg de torque son apropiados. Sólo se debe instalar servos digitales, en caso de que se practique acrobacia dura. Conviene usarlos a 6V para asegurar potencia de respuesta apropiada y dos servos en alerones (uno a cada alerón).
EJEMPLO DE SERVO 3KG
- Para aviones mayores a glow 0.55 hasta bencineros 30CC, deben usar servos de 6 a 9 kg de torque en cada superficie con engranajes metálicos y para mayores a glow 0.90; ojalá dos en timón o uno de 12 kg. El servo del acelerador puede seguir siendo el estandar de 3 kg, con pushrods plásticos.
SERVO ALTO TORQUE1
SERVO ALTO TORQUE 2
- Para aviones de 50CC o más; los servos deben ser metal gear y de 12 kg hacia arriba y 18 kg en el timón (o dos de 12). El acelerador y ahogador, pueden segir siendo los servos estandar de 3 kg con pushrod de plástico.
SERVO ALTO TORQUE 3
- Los servos digitales debieran usarse en los modelos que necesitan mayor velocidad de respuesta, como en el caso de los acrobáticos, bencineros y helicópteros. No es obligatorio, pero no se justifica el gasto para aviones o modelos de vuelo relajado o menor cilindrada.
- Los servos con engranajes metálicos se usan en aquellas superficies grandes o mecanismos que están sujetas a gran estrés, como son elevadores y alerones.
- En aviones sobre 50 cc y con predominancia de servos digitales; se hace necesaria la instalación de un Power Expander, Power box o centralita, para gestionar el elevado consumo energético. La función de este accesorio es la de aliviar la carga de trabajo del receptor, limitándolo sólo a la interpretación de las señales de radio, evitando glitch o apagados por sobreconsumo.
POWER BOX 1
POWER BOX 2
Acá hay una tabla referencial de torques para distintos tipos de modelos, según la superficie de los mandos.

Esta tabla se calcula con la siguiente fórmula:
Torque (oz-in) = 8.5E-6 * ( C[size=8pt]2[/size] V[size=8pt]2[/size] L sin(S1) tan(S1) / tan(S2)]
Donde:
C = Cuerda de la superficie de control en cm
L = Largo de la superficie de control en cm
V = Velocidad en MPH
S1 = Máxima deflección de la superficie en grados
S2 = Máxima deflexión del servo en grados
Para quienes se marean con las fórmulas; también existen aplicaciones desarrolladas por aeromodelistas muy amables.
CALCULADOR DE SERVOS
OTRO CALCULADOR DE SERVOS
4.- INSTALANDO SERVOS:
Para que los servos trabajen bien; deben ser correctamente instalados en sus respectivas bancadas o bandejas. El collarín de bronce debe quedar con la cabeza hacia abajo, para que impida que el tornillo apriete excesivamente los amortiguadores de goma.
Los servos deben quedar correctamente alineados, para que el brazo y el pushron no trabaje forzado.

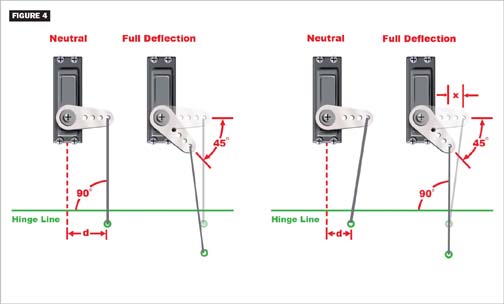
Otra forma de optimizar el movimiento del servo es no dejar el link totalmente a 90 grados cuando servo esté en su posición neutral, pues el servo necesita realizar su maxíma fuerza en su extensión máxima y eso se logra dejando un lijero desface entre el punto de unión del brazo y el cuerno de la superficie de mando, para que cuando el servo esté en su máximo recorrido, esté a 90 grados realizando toda la fuerza.
Recordemos que el torque indicado por el fabricante está dado por la distancia al centro del servo y si las especificaciones del servo dice que genera 3 kg-cm, quiere decir que a 1 cm del centro del servo (el tornillo del brazo), generará los 3 kg de fuerza. Si nos alejamos en el brazo a 2 cms; entonces tendremos sólo 1,5 kg de fuerza. Por esta razón, siempre se intenta que tanto brazo del servo, como el link en el cuerno de la superficie, estén a la misma distancia, para aprovechar el máximo de la fuerza. (pensemos esto como los cambios en una bicicleta).

Si te situas lejos del centro en el brazo y cerca en el cuerno, el servo estará sometido a sobreesfuerzo. Cualquier modificación para mantener la resolución del servo, debe ser a distancias iguales, considerando que a mayor distancia del centro del servo, menor fuerza tendrá este para mover la superficie.
5.- Enlaces de interés:
GRAN BASE DE DATOS DE SERVOS
CORRECTO SETUP DE SERVOS1
CORRECTO SETUP DE SERVOS 2
No hay comentarios:
Publicar un comentario